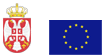
ПОНОВИТИ ПОГОНСКЕ СИСТЕМЕ Да би се утврдиле могућности за практичну реализацију обртног и транслаторниг кинематичког пара треба одредити : - начин реализације машинског склопа који ће дозволити померање само дуж једне осе (транслаторни зглоб ) и склопа који омогућава обртање око једне осе ( обртни зглоб ).За дозвољену осу померања сви склопови треба да обезбеде минимум трења . - начин покретања кинематичког пара. Приликом одређивања положаја за постављање мотора мора се водити рачуна да се постигне : - што мањи зазор и што већи коефициент корисног дејства , - лака монтажа и демонтажа , да не сметају раднику који опслужује уређај или смањује могућност кретања делова система; - код робота смањење статичког оптерећења. Смањење зазора и ефикасности се постиже директним погоном , да се користи што мање елемената за пренос снаге. Код мотора за покретање зглобова шаке није могуће остварити директан погон зато се постављају иза лакта чиме осим складности добијамо и контратежину која доприноси статичком уравнотежењу.Пренос погонског момента се постиже помоћу три шупља коаксијална вратила. Код лакта робота погонски момент се помоћу ланца, ремена или вратила преноси до лакта.  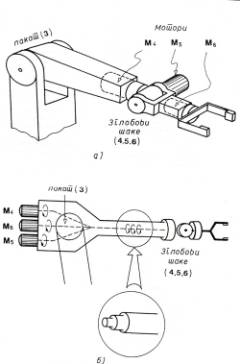
1. Шта је потребно одредити за реализацију обртног и транслаторниг кинематичког пара ? 2. О чему је потребно водити рачуна приликом постављања мотора ? 3. Како се поставља мотор за покретање зглобова шаке ? |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.