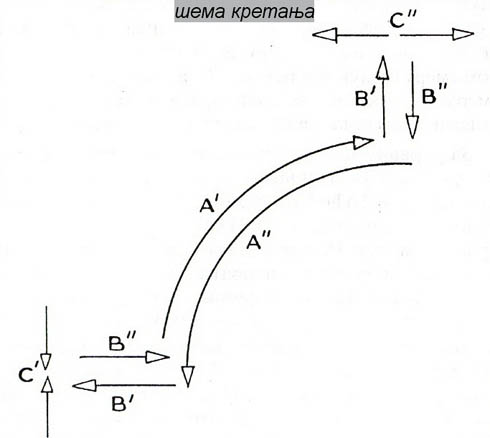
ПРВИ ДЕО ЧАСА : поновити шта су унутрашње координате , закон задатог кретања ДРУГИ ДЕО ЧАСА: Манипулатор је механички систем са три осе померања (зглоба). I - померање обртања око вертикалне осе II - померање: транслаторно издужење руке III – померање: стискање хватаљке Свако од ових кретања се одвија под дејствим сопственог пнеуматског погона. Начин кретања између крајњих положаја (1`-1``;2`-2``;3`-3``) не може се контролисати.У овом случају положај покретних делова посматрамо као логички променљиве у облику 0 или 1. За мерење положаја прве кординате поставићемо два бинарна детектора један уположају 1` а други у положају 1``.Ако детектор даје излаз 0 онда покретни део није у том положају, а 1 да јесте. Кретање – хватање предмета на покретној траци, преношење до пресе , уношење у пресу и повратак ради новог хватања. А`- активирање првог пнеуматичког погона у позитивном смеру А``- активирање истог погона у супротном смеру В`- активирање друге осе у позитивном смеру (издужење руке В``- активирање у негативном смеру (увлачење руке) С`- активирање трећег пнуматског погона у смеру стискања С``- активирање у смеру отварања 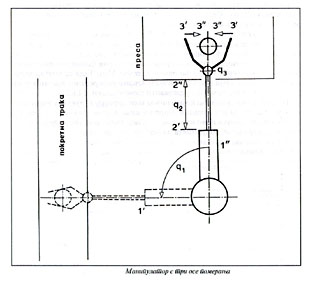
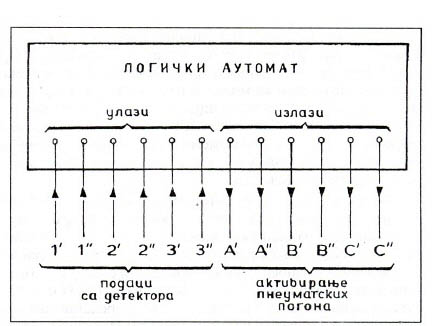
ЛОГИЧКИ АУТОМАТ СА 6 УЛАЗА И 6 ИЗЛАЗА На улазе доводимо податке са детктора. На својим излазима логички аутомат даје 0 и 1. Повезивање улаза и излаза аутомата се постиже програмирањем аутомата. У њему се форимирају логичке функције које за сваку комбинацију на улазу дају жељене излазе.
1.Шта је манипулатор ? 2.Како посматрамо положај покретних делова? 3.Објаснити шему кретања ? |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.