|
 |
Почетна | О школи | Колектив | Актуелности | Е-знање | Ученици | Сарадња | Контакт | ||||||||||||||||||||||||
 |
|||||||||||||||||||||||||
|
|||||||||||||||||||||||||
 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“. Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“. |
|||||||||||||||||||||||||
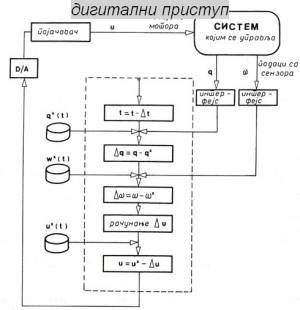
Користимо исти механички систем обртну платформу.Посматрамо управљање континуалним кретањем и задато референтно обртање q*( t ).Референтној промени угла одговара и нека референтна промена брзине ω*( t ).
Код дигиталног приступа управљању врши се дискетузација континуалних променљивих.Свака функција временом се посматра као низ вредности које одговарају низу тренутака времена.Интервал између ова два тренутка назива се интрвал дискретизације.Референтне функције се задају у виду низова тачака и запамћени су на некој меморијској јединици.Величина интервала Δt је неколико милисекунди.
Подаци морају бити у дигиталним облику.Веза се између рачунара и сензор остварује помоћу интерфејса.
После обраде података у рачунару и добијања бројних вреднисти управљачког напона ,потребно је дигитални податак превести у аналогну форму тј. добити електрични напон који се у електронском појачавачу доводи до тражене вредности.
Са диска се очитавају вредности референтног положаја брзине за тај тренутак q*( t ) и ω*( t ) и израчунава грешка Δ q = q- q*и Δω=ω-ω*. На основу тога се формира корекција управљања Δu .Са диска се учитава вредност референтног управљања U*( t ) и од ње одузима корекција u=u*- Δu .
Управљање реализујемо понављајући описани циклус наког свског интервала Δt.Док се израчунава нова вредност управљања , на моторе се примењује израчината вредност у претходном кораку.Управљање има сталну вредност током интервала Δt, а затим се сковито мења.