ПОНОВИТИ ЛОГИЧКИ ПРОГРАМАБИЛНИ АУТОМАТ Математички модел даје везу између улаза и излаза система.За задато референтно кретање q*(t) можемо израчунати одговарајуће управљање u*(t ) која називамо референтно или номинално управљање. Имамо механички систем од једне платформе која се обрће око вертикалне осе.Угао обртања q . Покретање се врши моторима једносмерне струје. 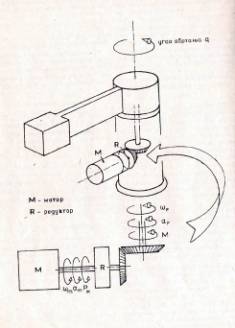
Једначина обртања плоче : Mp=Ip αp Једначина електромотора : Imαm=CMi-Mm u=CE ω m +Ri Ip - момемт инерције плоче Mp - момент на осовини αp - угао убрзања плоче Захтев за кретање платформе је да се плоча обрне за Δq=90° у току T=2s. Отворена управљачка шема не доводи до прецизне реализације траженог кретања. Потребне су одговарајуће корекције управљања : u=u*- Δu Δu -величина корекције Величина корекције зависи од величине грешке Δ q и Δω.То значи да улазна величина система зависи од тренутних вредности узлазних величина кретања q и ω ,што представља принцип повратне спреге.Уовом случају је негативна повратна спрега . Δq = q - q * Δω=ω-ω* Δu=kqΔq+kωΔω kq kω - коефиценти појачања повратне спреге kq - позиционо појачање kω - брзинско појачање Потребно је претходно израчунавање референтног управљања u*(t ) меморисати и користити у процесу управљања. Да се не би повећавала грешка повећавају се коефициенти појачања. Ако крајњи положај посматрамо као референтни q*(t) = q’’=const разлика између крајњег и почетног положаја ће бити посматрана као грешка у почетном тренутку Δq (0)= q’’ - q’ q*(t) има константан положај , референтна брзина је једнака нули ω *(t)=0 . u= kq( q’’ - q’)-k ω ω Δq = q - q *= q’’ - q Δω=ω-ω* = ω Ако су q’ и q’’ много удаљени почетна грешка може бити велика, што ће изазвати велики управљачки напон, па се управљање зато ограничава - umax ≤ u ≤ umax. Ако су грешка и израчунато управљање веће, примењиваће се максимално дозвољено управљање у засићењу. Када постоји низ положаја у које систем треба довести , а да се при томе не води рачуна о кретању између тих положаја, поступак се понавља за сваку тачку низа –управљање тачка по тачка. Ако је дат референтни закон кретања тј.задат положај за сваки тренутак времена имамо управљање континуалним кретањем. 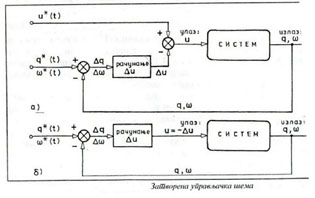
1. Из чега се састоји дати механички систем ? 2. Када имамо негативну повратну спрегу ? 3. Од чега зависи величина корекције 4.Како се израчунава референтно управљање ? |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.