Излазна величина елемента пропорционална је интегралу по времену улазне величине , због тога је овај елемент добио назив интегрални .  Ова једначина показује да је излазна величина регулатора пропорционалана интегралу улазне величине. Кi – коефицијент пропорционаланости или коефицијент преноса интегралног регулатора или динамички параметар регулатора и може се подешавати. 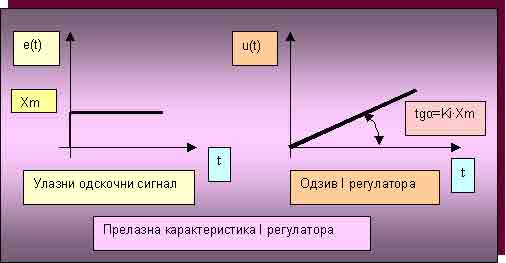 Ако се на улаз интегралног елемента доведе одскочна улазна функција Xm ,после извршеног интегрирања добија се карактер прелазног процеса у облику :  Ова једначина показује да ако се на улаз доводи одскочна улазна величина, на излазу добија се величина која линеарно расте са временом.А њен нагиб је одређен углом α , што значи да ће већој вредности одскочне величине Xm одговарати већи угао нагиба излазне величине. Преносна функција се добија на основу следећег израза :  Пример овог регулатора је електронски интегрални регулатор са једним улазом. 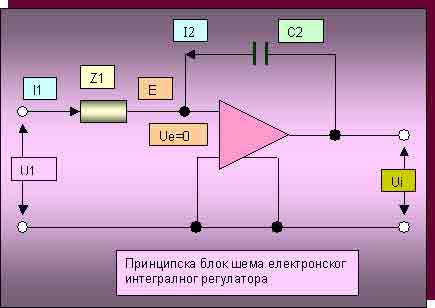  Дејство регулатора је релативно споро због динамичких својстава интегралног елемента, због чега се ретко користи као самостална јединица. У већини случајева он трајно отклања одступања регулисане величине,те му је тачност најбоља особина. Недостатак му је што уноси извесну нестабилност у регулационо коло. |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.