Пропорционално-интегрално-диференцијално деловање изражава се једначином : 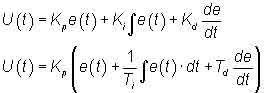 У динамичком смислу ови регулатори представљају систем од три паралелно везана динамичка блока :пропорционалног,интегралног и диференцијалног деловања.Регулатор се подешава преко подешљивих константи Кp, Тi и Тd. При вредности константе Тd = 0, PID регулатор прелази у регулатор PI деловања.Преносна функција регулатора је облика : 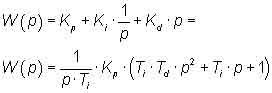 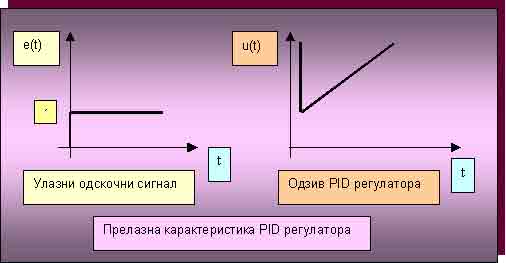 На следећој слици дат је PID регулатор где је импеданса диференцијалног деловања у улазној грани замењена сложеним деловањем у повратној грани појачавача (еластична повратна спрега са кашњењем). 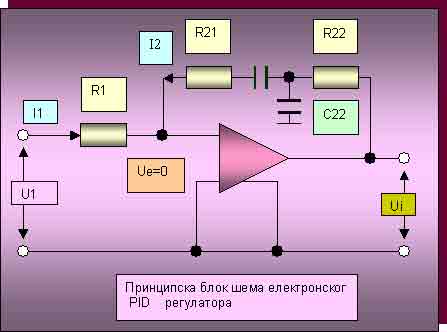 Преносна функција регулатора је :  Подешавање константи није погодно јер зависе од параметара импеданси,подешавање једне константе утиче на другу,а тежња је да узајамна зависност константни при подешавању буде што мања,што се постиже реализацијом регулатора из више основних јединица. |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.