Задатак овог система да се кретање осовине А пренесе на даљину тако да се угловни положај удаљене осовине В у сваком тренутку буде једнак угловном положају осовине А.Треба испунити услов α = β .Осовине А И В механички су повезане са клизачима потенциометра PА и PВ ,оба потенциометра напајају се из истог извора Е. 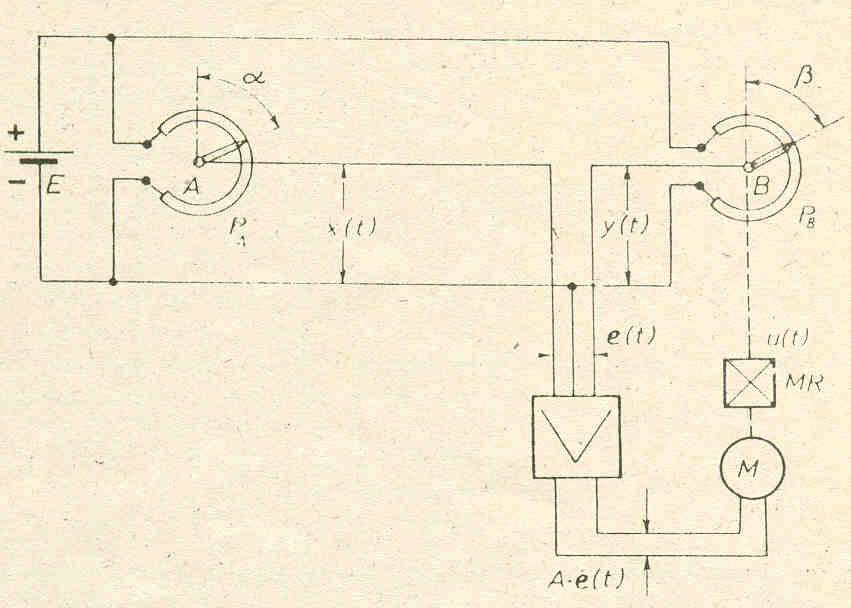 Аутоматски систем за пренос угловног помераја на даљину Напон са потенциометра PА сразмеран је угаоном положају α осовине А и представља улазну величину x(t) ,а напон са потенциометра PВ ,који је сразмеран угаоном положају β осовине В представља управљану –улазну величину y(t). Сигнали задате и регулисане величине се доводе и упоређују на симетричне Улазе диференционалног појачавача.Појачан сигнал делује на сервомотор М,А овај преко механичког редуктора МR покреће осовину В све док се не доведе у исти Угаони положај са осовином А, α =β Осовима В у сваком тренутку аутоматски прати кретање осовине А. Исти пратећи систем се може остварити системом селсина. 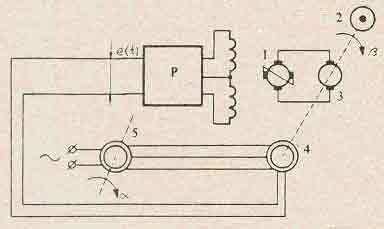 Систем за аутоматско праћење угловног помераја Регулисана величина је угао обртања β објекта управљања (2).Погонски мотор напаја се из електромашинског појачавача (1) и може се окретати у оба смера.Задата величина уводи се преко селсина предајника (5) у облику угла обратња α осовине његовог ротора. Селсин предајник и селсин пријемник (4) међусобно су везани трансформаторском везом ,те се на излазу пријемног сигнала добија сигнал у облику напона који је пропорционалан разлици улазног и излатног угла (положај ротора).У појачавачу Р напон грешке е(t) појачава се ,а затим се доводи на улаз извршног мотора који истовремено покреће објекат управљања и ротор селсина пријемника све док се не испуни услов да је α =β . |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.