ПОНОВИТИ флексибилну аутоматизацију Дефинисање везе тела и степена слободе Кинематички пар подразумева два тела која су међусобно(механички) повезана.У односу на то како су повезана та два тела, кинематички парови се деле на одређене класе. 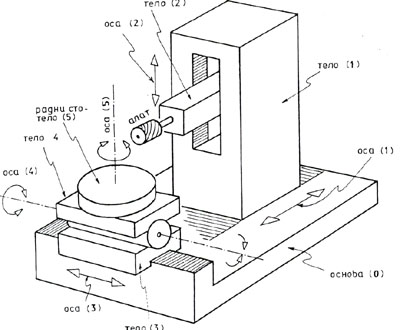
Лабава веза je најслабија веза- случај када између два тела нема везе.Међусобно кретање се тада посматра преко 6 независних померања тела а то су транслације дуж оса x,y,z и обртања око сваке од тих оса.Тело има 3 слободне ротације и 3 слободне транслације.Потребна су 3 параметра да би се одредило транслаторно кретање и 3 параметра да би се одредило ротационо кретање. Степен слободе је број слободних независних кретања , односно број независних параметара који су потребни да би се једнозначно одредио положај тела. 
међусобна веза два тела 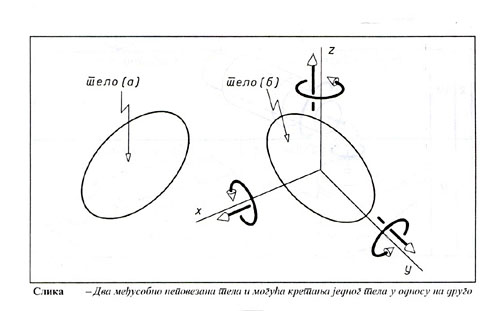
Пример: ако посматрамо на слици 3.5. везу ваљка и клешта видимо да ваљак има две слободне транслације дуж x и у осе и две слободне ротације око x и z осе укупно 4 слободна међусобна кретања ова два тела.Овај пар има 4 степена слободе.
Пар I класе је пар са 5 степени слободе. Пар II класе је пар са 4 степенa слободе. Пар III класе је пар са 3 степена слободе. Пар VI класе је пар са 2 степена слободе. Пар V класе је пар са 1 степеном слободе.
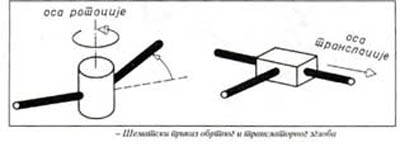
За нас су најважнији парови пете класе, то су парови који дозвољавају само једну ротацију или транслацију, ротациони или транслаторни пар.
- Шта је кинематички пар?
- Како се дефинише степен слободе?
- Изглед кинематичких парова?
|



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.