Према начину међусобног деловања елемената САУ могу се поделити на : - отворене, - затворене, - комбиноване системе. Отворен систем је онај систем у коме се за управљање објектом користи информацијасамо о његовом жељеном излазу и поремећају који делује на њега (поремећај се директно компензује).Примери отвореног система САУ могу се срести код аутомата који извршавају неке одређене операције,машине за прање веша,стругова итд. 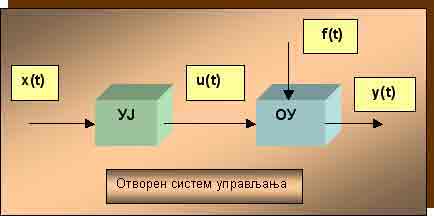 Управљачка променљива u(t)-представља излазну величину управљачког елемента којиделује на ОУ, Поремећај f(t)- је нежељени улаз који утиче на вредност излаза.Обухвата сванежељена дејства околине која теже да промене стање ОУ. Управљана променљива y(t) –излазна величина која у сваком тренутку одражава- Стање ОУ и његово понашање,служи за оцену ваљаности резултата управљања.- y(t) зависи од u(t). Код отвореног система управљања скуп закона по којима треба да се мења управљачка променљива u(t) мора да се направи програм који извршава УЈ. u(t) = x(t) ± y(t) 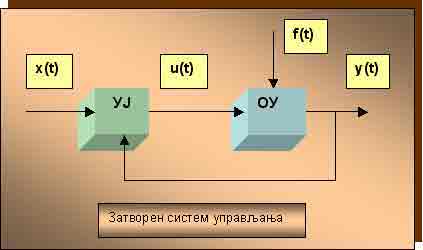 Затворен систем карактерише повратна спрега која омогућава да се поређењем излазне са улазном променљиве формира управљачка променљива u(t) која делује на улазу на ОУ као функција излаза y(t) и улаза x(t). Затворен систем карактерише повратна спрега која омогућава да се поређењем излазне са улазном променљиве формира управљачка променљива u(t) која делује на улазу на ОУ као функција излаза y(t) и улаза x(t).
Задата променљива x(t) –назива се референтна променљива или референца јер дефинише задату вредност излаза y(t).Управљачка променљива u(t) образује се на основу разлике тренутних вредности задатог улаза x(t) и иоствареног излаза y(t).Ако постоји одступање управљане променљиве од задате вредности УЈ делује на ОУ тако што разлику своди на што је могућу мању меру И ОУ доводи у задато стање. Предности повратне спреге су : повећана тачност,смањен ефекат нелинеарности,повећан пропусни опсег система у односу на промене улазног референтног сигнала. Недостаци повратне спреге су : нестабилност система и осциловање. |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.