Закон деловања пропорционално-диференцијалног регулатора изражава се следећом једначином :  Тd – временска константа која карактерише степен утицаја изводног деловања регулатора.Константе Кp и Тd су подесиви параметри регулатора.Преносна функција регулатора има облик :  Присуство изводне компоненте доприноси побољшању динамичких својстава система ,јер при генерирању управљачког сигнала,регулатор овог деловања узима у обзир,поред величине сигнала грешке,и тенденцију пораста или смањења овог сигнала.Брзина реаговања система овим се повећава ,одступање регулисане величине у динамичком режиму је мање.У општем случају регулатори овог деловања не отклањају у потпуности одступање регулисане верличине. 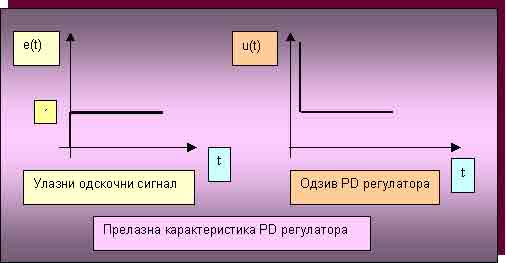 Тежња је да се избегну сви они недостаци које поседује диференцијални регулатор,с тога све што је константовано у вези њега то важи и овде.Решење је у уклањању кондензатора из директне гране појачавача. 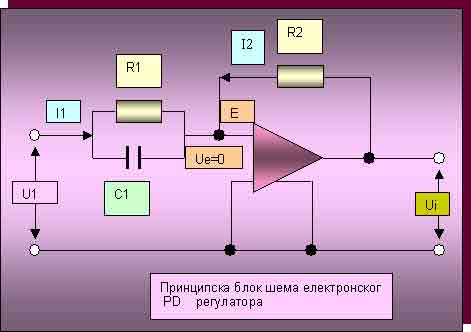 Преносна функција је : 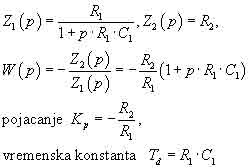 С обзиром на начин обраде сигнала овај регулатор има веома значајно место у регулацији променљивих технолошких процеса изазваним деловањем јаких поремећаја. |



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.