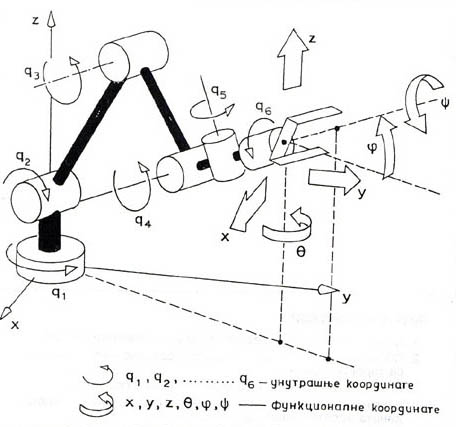
Кретање кинематичког ланца остварује се релативним померањем суседних сегмената.Положај дефинишемо тако што дефинишемо померања у сваком његовом зглобу.Зглобове означавамо бројевима 1,2,3.., а померања у њима са q1,q2,q3... .Ако ланац има n зглобова кажемо да уређена n-торка бројева q=(q1 ,q2,...qn) дефинише положај ланца. Посматрање ланца преко унутрашњих координата погдно је због тога што погонски моменти или силе делују баш у зглобовима, између суседних сегмената. Код глодалице померања у зглобовима нису непосредно значајна ,најважније је да алат заузме тачно одређен положај у односу на обрадак учвршћен на радном столу, а да се затим релативно померање алата и обратка одвија по одређеном закону.Кретање алата у односу на обрадак називамо функционалним кретањем а величине за његово дефинисање функционалним координатама. Код робота је битан положај и кретање хватаљке у односу на околину. Функционалне координате робота три транслације( x,y,z ) и три ротације ( ). Код робота се користи термин спољашње кретање и спољашње координате. Да би се могао извршити постављени задатак на машини или роботу потребно је да се прво зада , а затим оствари одређено функционално кретање.То кретање се остварује помоћу погонских система који су постављени у зглобовима .Померања у зглобовима робота стално се мере током његовог рада.Да би се проверио тачан положај хватаљке у односу на околину потребно је израчунати функционалне координате X , полазећи од измерених координата q. 
- Како дефинишемо положај ланца?
- Кретање код алатних машина?
- Кретање код робота?
|



 Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.
Пројекат “Е-Знање Ужице“ изведен је под покровитељством Министарства просвете и спорта Републикe Србијe, финансиран од стране Европске Уније, као део иновационог фонда “ВЕТ Србија“.